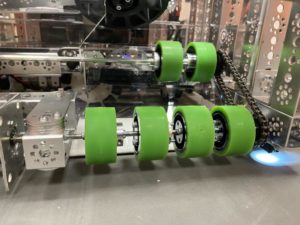
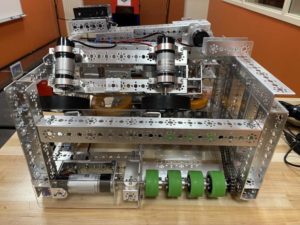
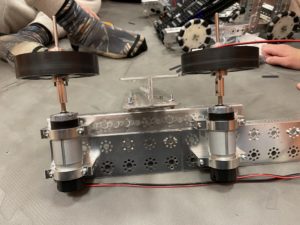
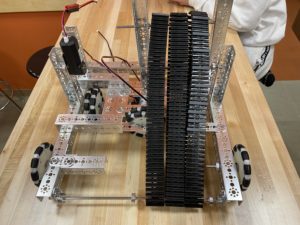
The team has spent the past week preparing for the league meet scrimmage held on Saturday the 20th. Before the scrimmage started the team wanted to know at what voltage the robot should be at in order to shoot the rings into the top goal consistently. We did this by firing the rings in the same spot we would for the competition, marking where the rings hit and at what voltage the battery was at, and we gradually ran down the battery voltage. Through this process the team found that any voltage above 14 would shoot the rings into the top goal so before every round we switch out the battery in order to make sure that the rings go into the top goal consistently. The team also practiced driving for the competition. For the competition, there are two drivers. One team member controls the wheels and drives the robot itself while the other team member controls the intake, outtake, roundabout, and arm (basically this member controls the shooting of the rings and the taking of the wobble goal). The pairs of members who practiced driving together were Alex and Peter, Ramsey and Jon, and Ben and Eli. These pairs ensured that everyone who is present for the competition gets to drive. These preparations paid off in the end and helped us meet our goals for the competition on Saturday.

The team is competing at a virtual scrimmage with team members Ramsey and Ben controlling the robot.