
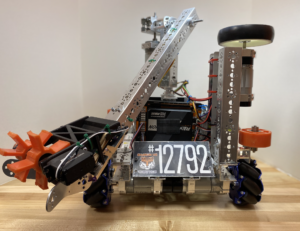
Into The Deep (2024-2025):

Our eighth robot has 4 main systems including 8 motors and 3 servos. Our robot consists of a drivetrain, an intake and outtake, and a lift. We use color and distance sensors to detect locations on the field for autonomous. We have lights on our robot that change from orange and white based on whether or not we have a specimen in our intake system. Our front intake system consisted of a drop down arm and 3D printed pieces and a slight extension in the arm. When picking them up it will go back and drop it into our bucket lift system to allow it to go into the different levels of buckets. We have another system to pick specimens up from the human player with precise claws on both sides. We have a lift system for endgame allowing a first level descend. We have an elegant outer shell to keep a modest look and for protection if a robot collided with ours.
Center Stage Play Robot(2023-2024):

Our seventh robot has 4 main systems including 8 motors and 3 servos. Our robot consists of a drivetrain, an intake and outtake, a lift, and a drone launcher system. We use color and distance sensors to detect locations on the field and a camera for our vision system during autonomous. We have lights on our robot that change from red to green based on pixel detection on the field. Our front intake system includes a wrist, arm, and shoulder that all work in sync to deliver pixels to the target destination on the backdrop. The intake system is connected to a linear lift system that allows our robot to reach the extended lines and also lift itself for hanging at end-game. On the back of the robot is our drone launcher.
Power Play Robot(2022-2023):

Our robot design has 4 main systems including 5 motors and 2 servos. Our robot consists of a drivetrain, an intake and outtake, a lift using a cable system, and a back retrieval arm. We use a distance sensor to detect locations on the field and a camera for our vision system during autonomous. We have lights on our robot that change from red to green based on cone possession. Our intake system consists of 4 wheels that are connected to 2 VEX servo motors. The wheels allow for easy collection and the drop-off of cones. Our CAD team designed and 3D printed a front alignment piece that helps position cones for delivery. The intake system is connected to a linear slide lift.
Freight Frenzy Robot (2021-2022):
Our fifth robot is the Freight Frenzy Robot. This robot has five main systems that includes a drive train, an intake and outtake, a turret system, a lift arm, and a duck spinner. The turret system attaches to the lift arm to allow the robot to pick up field elements from any direction. Featured on this robot is an LED light system that turns from red to green based on cargo possession. The Freight Frenzy Robot has a length of 18 inches, a width of 14 inches, and a height of 17 inches, making this robot extremely compact in order better maneuver around the field and fit into the warehouse. The Freight Frenzy Robot is now happily retired and displayed in our lab.
Ultimate Goal Robot (2020-2021):
 Our fourth FTC season allowed our team to build our Ultimate Goal robot. This robot went through multiple design changes that allowed the tasks to be completed with effectiveness and accuracy. There are several systems on the robot including an intake, internal delivery system (roundabout), an outtake, and a grabber arm for the wobble stick. The roundabout system was inspired by our community and the newly installed roundabout in Sharon and Hermitage. The intake and outtake when through multiple testings, finally providing us a desired outcome. The robot had multiple sensors including three distance sensors to detect the rings on the field, two color sensors to allow for line detection and squaring, and two touch sensors, which allowed our arm to have a set limit to travel. The robot is now our outreach robot, inspiring hundreds of children at various events in the community.
Our fourth FTC season allowed our team to build our Ultimate Goal robot. This robot went through multiple design changes that allowed the tasks to be completed with effectiveness and accuracy. There are several systems on the robot including an intake, internal delivery system (roundabout), an outtake, and a grabber arm for the wobble stick. The roundabout system was inspired by our community and the newly installed roundabout in Sharon and Hermitage. The intake and outtake when through multiple testings, finally providing us a desired outcome. The robot had multiple sensors including three distance sensors to detect the rings on the field, two color sensors to allow for line detection and squaring, and two touch sensors, which allowed our arm to have a set limit to travel. The robot is now our outreach robot, inspiring hundreds of children at various events in the community.
Skystone Robot (2019-2020):

The Skystone Robot is our third robot (special thanks to Sharon Rotary and our other sponsors). The Skystone Robot is the robot we are currently competing with for the 2019-2020 season, Skystone. Our robot is designed to complete the tasks presented to us for the 2019-2020 season such as picking up block, stacking blocks, picking up our capstone, stacking our capstone, and moving the foundation. The Skystone Robot arm has undergone three major design changes. We started with a wheel intake design but failed to recognize that the blocks were too heavy for this design to be efficient. Our second design used a linear actuator but was too slow to be very efficient. Our third, and currently final, design uses a servo mounted to the arm with an elastic return to hold and stack the blocks and capstone. Our team has found this design to be very efficient and effective given that we are able to stack five block and the capstone onto the foundation. Our base uses mecanum wheels which allows the robot to get to the blocks quickly and move in multiple directions. The Skystone Robot has multiple autonomous programs but there are two main programs. Our autonomous uses the robots distance and light sensors to move the block with the picture on it, skystone, and parks under our teams bridge. Our other autonomous program moves the foundation into our teams base and then parks under our teams bridge. In the teleop portion we are able to pick up and stack block and the capstone, max is five stacked with capstone as mentioned previously, then during endgame the Skystone Robot is able to move the foundation out of our base and park in the base with room for our alliance partner’s robot.
Rover Ruckus (2018-2019):

SHIELA was our second robot. SHIELA stood for Sharon High Innovation Engineering & Learning Achieved. It performed the tasks we needed for the 2018-2019 season, Rover Ruckus. It was able to reach into the crater to grab the balls and cubes using a loofah attachment that we called the Loofah Sucker. and put them into the correct sides on the lander. SHIELA was also able to hang on the lander at the beginning and end of each match. The autonomous was fully functional, dropping off of the lander, delivered the team marker into the safe zone, knocked a random ball off, and parked on the crater. The teleop was also fully functional, grabbing balls and cubes to put in the lander. During endgame we tried to get as many minerals into the lander as we could before hanging on the lander. SHIELA took us to States in Oxford, Pennsylvania where we did not place but learned a lot. SHIELA is now retired, and some of its parts will be used on the robot for the 2019-2020 season.
Relic Recovery (2017-2018):
 Old Reliable was our first ever robot. Its first mission was to compete in FTC during the Relic Recovery season. It had a functional color sensor that allowed it to complete the jewel mission. Old Reliable also had an elevator/grabber that was able to fully fill the crypto box by lifting two blocks and placing them on top of the others. It used mecanum wheels that allowed it to move in any direction and was built using a REV kit. Our city street department gave us a used street sign that we used to strengthen the sides. Old Reliable is now happily retired.
Old Reliable was our first ever robot. Its first mission was to compete in FTC during the Relic Recovery season. It had a functional color sensor that allowed it to complete the jewel mission. Old Reliable also had an elevator/grabber that was able to fully fill the crypto box by lifting two blocks and placing them on top of the others. It used mecanum wheels that allowed it to move in any direction and was built using a REV kit. Our city street department gave us a used street sign that we used to strengthen the sides. Old Reliable is now happily retired.